Die Magnetfeld-Messung steht für ein Messprinzip, das auf die Wirkung des magnetischen Feldes auf Festkörper wie bei der Distanzmessung als Näherungsschalter ausgerichtet ist (siehe auch Sensor).
Die Magnetkupplung dient der Leistungsübertragung an Kreiselpumpen und besteht aus einem starr mit der Motorwelle verbundenen Primärteil und gemeinsam mit einem Laufrad auf einer Welle (siehe Pumpenwelle) sitzenden Sekundärteil. Primär- und Sekundärteil sind mit Permanentmagneten bestückt. Es stehen sich jeweils ungleichnamige Pole gegenüber, die sich infolge des magnetischen Kraftflusses gegenseitig anziehen. Wird der Primärteil angetrieben, dann läuft der Sekundärteil synchron (mit gleicher Drehzahl) mit.
Kreiselpumpen mit einer Magnetkupplung werden auch Magnetkupplungspumpen oder Magnetpumpen genannt und mittlerweile bis zu Leistungen von ca. 400 kW gebaut. siehe Abb. 1 Magnetkupplung
Abb. 1 Magnetkupplung: Schematische Darstellung
Steigt das zu übertragendeDrehmoment, dann vergrößert sich auch der Polradwinkel zwischen den Achsen der Magnete vom Primär- und Sekundärteil. Übersteigt das zu übertragende Drehmoment einen Maximalwert (Abreißmoment), dann fällt die Kupplung außer Tritt und der Sekundärteil bleibt stehen. In diesem Fall muss die Antriebsmaschine abgestellt werden, da ein Hochlauf nur synchron möglich ist.
Dieser Nachteil, der beim Antrieb von Kreiselpumpen bei richtiger Bemessung meist keine Rolle spielt, tritt nicht beim Aufbau des Sekundärteils wie ein Kurzschlussläufer eines Asynchronmotors auf. Hierdurch werden ein asynchroner Hochlauf und Betrieb ermöglicht.
Durch den Einbau einer (aus Sicherheitsgründen gelegentlich doppelten) Trennwand im Spalt zwischen Primär- und Sekundärteil der Magnetkupplung (doppelwandiger Spalttopf) wird eine vollständige Magnetkupplung: Abdichtung der Pumpe erreicht. Kreiselpumpen mit einem Antrieb über eine Magnetkupplung werden daher ähnlich verwendet wie Spaltrohrmotorpumpen. siehe Abb. 3 Chemienormpumpe
Die Magnetkupplung ist nicht zu verwechseln mit der elektromagnetischen Kupplung, die zum Schalten oder auch zum Absichern von Stoßbelastungen dient.
Die Magnetkupplungspumpe ist eine wellendichtungslose Pumpe, bei der das Wellendrehmoment mit einem Dauermagnetkupplungs-Antrieb (siehe Magnetkupplung) durch magnetische Induktion übertragen wird.
Bei der Pumpe mit Magnetkupplung kann bei einer im Betrieb entstandenen Undichtheit des Spalttopfes Leckage in die Umgebung gelangen, weshalb gelegentlich doppelwandige Spalttöpfe (Spaltrohre) mit Leckageanzeige zum Einsatz kommen.
Abb. 1 Magnetkupplungspumpe: Chemiepumpe mit Antrieb über Dauermagnetkupplung (Magnetkupplungspumpe)
Die magnetoelastische Messung steht für ein Messprinzip, das auf die magnetische Permeabilitätsänderung wie bei der Drehmoment- oder Kraftmessung ausgerichtet ist (siehe auch Sensor).
Das Manometer ist ein Druckmessgerät zum Anzeigen des physikalischen Drucks eines Fluids. Die Bezugsgröße dabei ist meist der Außenluftdruck (siehe auch Druckmessung).
Der Massestrom (ṁ) ist der Durchsatz von Masse pro Zeiteinheit durch einen Bezugsquerschnitt. Bei Kreiselpumpen ist der Massestrom als die durch den Austrittsquerschnitt und etwaige Anzapfquerschnitte der Pumpe in der Zeiteinheit geförderte Masse des Förderstroms definiert.
Der Master ist der zentrale Busteilnehmer, der den Buszugriff in einem Kommunikationssystem regelt. Alle weiteren Busteilnehmer arbeiten als Slavesund sind vom Master abhängig.
Der Master/Slave-Betrieb kennzeichnet die hierarchische Zugriffsverwaltung auf gemeinsame Ressourcen eines Kommunikationssystems. Bei der dezentralen Bussteuerung vergibt bspw. ein Automatisierungsgerät (Master) die Zugriffsrechte für die anderen Komponenten (Slave). siehe Abb. 1 Master/Slave-Betrieb
Abb. 1 Master/Slave-Betrieb: Kreiselpumpen mit integriertem intelligenten Antrieb
Bei dem mechanischen Antrieb erfolgt die Drehmomentübertragung mithilfe von Übertragungsmitteln wie Kupplungen oder auch Riementrieben (siehe auchAntrieb).
Der mechanische Wirkungsgrad (ηm) ist ein Wirkungsgrad, der das Verhältnis des um die mechanischen Leistungsverluste (Pv.m) verminderten Leistungsbedarfes (P) zum Leistungsbedarf selbst beschreibt:
Der Leistungsverlust setzt sich im Wesentlichen aus den Reibleistungen in den Pumpenlagern (z. B. Gleit- und Wälzlager) und in den Wellendichtungen zusammen.
Er liegt meist zwischen 0,5 und 2 % des Leistungsbedarfes, wobei die kleineren Werte vor allem für die leistungsstärkeren Kreiselpumpen gelten.
In der Mechatronik sind mechanische, elektronische und informationstechnische Komponenten zusammengefasst. Der Begriff ist abgeleitet aus den Fachbereichen Mechanik, Elektronik und Informatik.
Das Meerwasser ist unter chemischer Betrachtung eine salzhaltige, wässrige Lösung. Der Salzgehalt der einzelnen Meere variiert von 0,3 bis 1,7 % (Ostsee) bis zu 28 % (Totes Meer). Das im Meerwasser enthaltene Meersalz besteht hauptsächliche aus Natriumchlorid (Kochsalz). Meersalz enthält zudem Magnesiumchlorid, Magnesiumsulfat, Calziumsulfat, Kaliumchlorid und Calziumcarbonat sowie Spuren weiterer Salze (siehe auch Beständigkeitstabelle).
Eine Meerwasserentsalzungsanlage ist eine betriebliche Einrichtung, mit der aus Meerwasser Trink- oder Betriebswasser gewonnen werden kann.
Die Meerwasserentsalzung gewinnt heute immer mehr an Bedeutung. Es gibt vom Prinzip her verschiedene Verfahren, um das aus dem Meer geförderte Rohwasser in entsalztes Wasser umzusetzen, das aufbereitet z. B. als Trinkwasser verwendet werden kann. Aufgrund des notwendigen hohen Energiebedarfs lohnen sich die Meerwasserentsalzungsverfahren nur dort, wo Süßwasser wie auf Inseln oder Schiffen knapp ist.
Verfahren zur Meerwasserentsalzung
Destillationsprozesse
Gefrierprozesse
Solventextraktion
Umkehrosmose
Elektrodialyse
Ionenaustauschprozesse
Eine technische und praktische Bedeutung haben von den Verfahren zur Meerwasserentsalzung das RO- (Reverse Osmosis, Umkehrosmose) und bei den Destillationsprozessen das MSF-Verfahren.
MSF-Verfahren
Die Bezeichnung MSF ist die engl. Abkürzung für "Multi-Stage-Flash" und steht für die Mehrstufen-Entspannungs-Verdampfung. Dabei wird das mit einer Pumpe aus dem Meer geförderte Rohwasser beim Durchlaufen der Kondensierschlangen als Wärmetauscher jeder einzelnen Stufe stetig erwärmt. siehe Abb. 1 Meerwasserentsalzungsanlage
Nach Verlassen der Stufe 1 wird die Temperatur des Rohwassers durch den Soleerhitzer als weiteren Wärmetauscher nochmals erhöht. Dieser Soleerhitzer erhält seine Wärmemenge bspw. aus dem Abdampf der meist mit dem Bau der Meerwasserentsalzungsanlage gekoppelten Prozessanlage oder des Kraftwerks (z. B. Kohlekraftwerk). Die auf höhere Temperatur gebrachte Sole strömt dann unter Abgabe von Dampf durch die Verdampfungskammern der Stufen 1 bis 10. Der Dampf steigt dabei bei jeder Stufe durch die Entnebelungseinrichtung und kondensiert an den Kondensierschlangen. Das Kondenswasser (Destillat) wird in den darunterliegenden Becken aufgefangen und nach der letzten Stufe zur weiteren Aufbereitung weitergeleitet. Von Stufe zu Stufe wird der Druck weiter abgesenkt, wodurch auch die Temperatur der Sole ab- und die Salzkonzentration zunimmt. Für dieses Verfahren werden hauptsächlich folgende Kreiselpumpen eingesetzt: die Rohrgehäusepumpe als Soleumwälz- und Kühlwasserpumpe, die Spiralgehäusepumpe in Prozessbauweise als Destillat- und Entkarbonisierpumpe, die zwei- strömige Spiralgehäuse- als Soleabziehpumpe sowie die vertikale Kondensatpumpe.
RO-Verfahren
Die Bezeichnung RO ist die engl. Abkürzung für "reverse osmosis" und bedeutet Umkehrosmose.
Das Verfahren der umgekehrten Osmose beruht auf folgendem Prinzip: Bei wässrigen Salzlösungen mit unterschiedlichen Konzentrationen, die durch eine semipermeable (halbdurchlässige) Membran voneinander getrennt sind, dringt aus der Lösung mit der geringen Konzentration das Wasser durch die Membran in den Bereich der höheren Konzentration (Osmose). Dieser Vorgang hält bis zum Ausgleich der Konzentrationen und zum Aufbau eines bestimmten Druckes (osmotischer Druck) auf der Seite höherer Konzentration an.
Wird der Druck auf der Seite mit hoher Konzentration auf Werte über dem des osmotischen Drucks erhöht, so läuft der Vorgang in umgekehrter Richtung (Umkehrosmose) ab. Aus der Salzlösung hoher Konzentration dringt dabei hochreines Wasser mit nur noch sehr geringem Salzgehalt durch die Membran. Dieses Wasser (Permeat) kann als Trinkwasser verwendet werden, während auf der Druckseite der Membran konzentriertere Salzlösung zurückbleibt. siehe Abb. 2 Meerwasserentsalzungsanlage
Abb. 2 Meerwasserentsalzungsanlage
Moderne Meerwasserentsalzungsanlagen basieren auf dem Prinzip der Umkehrosmose. Dabei wird Salzwasser entgegen seinem osmotischen Druck durch eine Membran gedrückt, die nur für die Wassermoleküle durchlässig ist. Hierzu wird Seewasser unter Druck an der Membran vorbeigeleitet, wobei ein Teil des Wassers die Membran passiert und das abströmende Seewasser (engl. "brine") konzentriert wird. Der Anteil des durch die Membran diffundierenden Wassers beträgt etwa 40 % des eingesetzten Seewassers. Die verbleibenden 60 % des aufkonzentrierten Brine werden als Abwasser abgeführt.
Der über der Osmosemembran abfallende Druck ist unabhängig vom Verhältnis der Salzkonzentration auf beiden Seiten der Membran. Beträgt dieser 65 bar, dann entsteht ein nicht wiedergewinnbarer Energieverlust (W) von 1,76 kWh/m3 vom entsalzten Wasser. Dahingegen kann die im Brine enthaltene Energie größtenteils zurückgewonnen werden.
Unter Berücksichtigung aller Wirkungsgradverluste der RO-Anlage muss von einem Energieeinsatz von mindestens 2,5 bis 5 kW/m3 ausgegangen werden. Der tatsächliche Energieeinsatz ist dabei zum einen von der Güte der Rückgewinnung der im abströmenden Seewasser enthaltenen Energie und zum anderen vom Wirkungsgrad der zur Druckerzeugung sowie zu Hilfsprozessen verwendeten Pumpen und Anlagen abhängig.
Der grundsätzliche Aufbau einer RO-Anlage ist für alle Anlagenarten ähnlich und unterscheidet sich wesentlich in der Art der Energierückgewinnung. Eine Möglichkeit der Energierückgewinnung besteht in der Entspannung des Brine-Druckes über eine Turbine und Rückführung der Wellenleistung der Turbine auf die Pumpenwelle.
siehe Abb. 3 Meerwasserentsalzungsanlage
Abb. 3 Meerwasserentsalzungsanlage: Entspannung über Turbine (mit Energierückgewinnung)
Die energetisch beste Möglichkeit der Energierückgewinnung ist die Verwendung einesDrucktauschers. Dabei wird der Druck des Brine direkt auf das zu entsalzende Frischwasser übertragen. siehe Abb. 4 Meerwasserentsalzungsanlage
Abb. 4 Meerwasserentsalzungsanlage: Entspannung über Drucktauscher (mit Energierückgewinnung)
Alle Anlagen sind entsprechend ihrer Ausführung mit verschiedenen Pumpen versehen, die aufgrund des zu fördernden Salzwassers alle in rostfreien Werkstoffen auszuführen sind. Dies gilt auch für die Armaturen. Bei Kleinanlagen wird aufgrund hohen Anlagenaufwands häufig auf eine Energierückgewinnung verzichtet. Der Druckabbau erfolgt in diesem Fall meist ungenutzt über ein Drosselventil. Sie sind meist nur mit einer Hochdruckpumpe ausgestattet. Neben den mehrstufigen Kreiselpumpen werden hier auch Kolbenpumpen eingesetzt. siehe Abb. 5 Meerwasserentsalzungsanlage
Abb. 5 Meerwasserentsalzungsanlage: Entspannung über Ventil (keine Energierückgewinnung)
Die größeren Anlagen verfügen meist über mehrere Pumpen. So wird das Salzwasser für die Anlage aus einem Reservoir mit einerVorpumpe gefördert, die entsprechend ihrer Aufstellung eine Bohrlochpumpe oder bei anderer Entnahmemöglichkeit eine andere Bauart sein kann. Das geförderte Salzwasser wird durch einen Filter gepumpt und feste Bestandteile sowie Schwebestoffe werden herausgefiltert. Eine dem Filter nachgeschaltete Hochdruckpumpe erzeugt den osmotischen Druck für die Osmosemembran. Anlagen mit Drucktauscher benötigen weiterhin eine Umwälzpumpe, die zur Überwindung der inneren Verluste der Membran, Armaturen und des Drucktauschers dient. Sie ist ebenfalls eine einstufige Kreiselpumpe mit einer Förderhöhe von ca. 30 m, die jedoch für den Systemdruck der Speisepumpe ausgelegt sein muss. Die Speisepumpe ist immer eine mehrstufige Kreiselpumpe, die entsprechend der Förderhöhe von ca. 650 m mit wenigen Stufen ausgeführt wird.
Bei mehrströmigen Pumpen wird der Gesamtförderstrom auf mehrere Laufräder aufgeteilt, die auf einer Pumpenwelle montiert sind. Die Förderhöhe bleibt dabei gleich.
In der Kreiselpumpentechnik erscheinen sie meist als zweiströmige Ausführung, bei der das Laufradpaar spiegelbildlich auf der Pumpenwelle angeordnet ist (siehe gegenläufige Pumpe). Diese Anordnung gleicht den auftretenden Axialschub aus. Dieser Vorteil, der gemeinsame Pumpensaugstutzen und das gemeinsame Spiralgehäuse machen aus dieser zweiströmigen Anordnung eine kompakte Bauweise z. B. für Wasserversorgungspumpen. siehe Abb. 1Mehrströmige Pumpe
Abb. 1 Mehrströmige Pumpe: Einstufige, zweiströmige Pipelinepumpe mit längsgeteiltem Gehäuse
Die mehrströmige Pumpe bietet durch das Parallelschalten der Laufräder eine entsprechende Vergrößerung des Förderstromes bei gleichbleibender Förderhöhe. Das Prinzip der mehrströmigen Pumpe wird angewandt, wenn der Förderstrom einer Kreiselpumpe für die Eintrittsquerschnitte eines Laufrades zu groß wird oder die Durchflussgeschwindigkeit im Eintrittsquerschnitt des ersten Laufrades aus Gründen des Kavitationsverhaltens herabgesetzt werden muss. Im Prinzip sind auch vier- oder sechsströmige Pumpen möglich, doch ist ihr Bauaufwand wegen der erforderlichen Verzweigungs- und Verbindungsstücke recht erheblich. Deshalb ist deren Verwendung verhältnismäßig selten. siehe in Abbildung 18c Laufrad
Die Mehrströmigkeit und -stufigkeit können auch miteinander kombiniert werden, wie z.B. bei der Pipeline- oder größeren Wasserversorgungspumpen.
Pumpen werden als mehrstufig bezeichnet, wenn mehrere Laufräder hintereinander angeordnet sind und vom Förderstrom seriell durchströmt werden.
Im Wesentlichen wird die Förderhöhe einer einstufigen Kreiselpumpe durch die Bauform des Laufrades und die Umfangsgeschwindigkeit bestimmt. Kann die Drehzahl aufgrund anderer Randbedingungen nicht weiter erhöht werden und führt die Vergrößerung des Laufraddurchmessers zu sehr kleinen spezifischen Drehzahlen und damit zu unwirtschaftlichen Wirkungsgraden, so kann durch die Hintereinanderschaltung mehrerer Stufen (siehe auch Serienbetrieb) die Förderhöhe wirtschaftlich gesteigert werden. Durch die Veränderung der Stufenzahl bei sonst gleichbleibenden Abmessungen und Drehzahlen verändert sich der Förderstrom einer solchen mehrstufigen Pumpe nicht, während sich der Leistungsbedarf und die Förderhöhe proportional zur Stufenzahl verhalten.
Ein Beispiel für eine Pumpe mit mehreren gleichartigen, in einer Tandemanordnung hintereinander geschalteten Stufengehäusen ist die Gliederpumpe. Diese Bauart wird häufig in der Kraftwerkstechnik, z. B. als Kesselspeisepumpe und in industriellen Anwendungen eingesetzt, wo hohe Drücke benötigt werden.
Die einzelnen Stufen einer mehrstufigen Pumpe müssen nicht in Tandemform, sondern können auch zum besseren Ausgleich des Axialschubes paarweise oder in Gruppen gegenläufig angeordnet sein (siehe gegenläufige Pumpe). Ein typisches Beispiel dafür ist die Pipelinepumpe. Mehrstufige Pumpen erschließen mit wirtschaftlichen Mitteln die höheren Druckbereiche der Raster von Baureihen. Weitere Vorteile der mehrstufigen Bauart sind das einfache Anzapfen nach einer Stufe oder das Vorsehen von Leerstufen für spätere Druckerhöhungen.
Nachteilig ist die bei sehr großen Stufenzahlen zunehmende Empfindlichkeit des Pumpenläufers gegen fremd- oder selbsterregende Schwingungen.
Zu jeder Stufe gehören ein Laufrad, einLeitradund (meist mit diesem vereint) eine Rückführbeschaufelung (siehe Rückführschaufel), die alle gemeinsam in einem Stufengehäuse Platz finden. Unabhängig von der Stufenzahl werden vor der ersten Stufe ein Einlaufgehäuse mit radialem oder axialem Einlaufstutzen und die letzte Stufe im Druckgehäuse angeordnet, das die Entlastungseinrichtung und eine Wellendichtung enthält. Nur die gemeinsame Pumpenwelle, Verbindungsschrauben und Grundplatte müssen an die jeweilige Stufenzahl angepasst werden. siehe Abb. 1 Mehrstufige Pumpe
Abb. 1 Mehrstufige Pumpe: mit axialem Einlaufstutzen
Die Bezeichnung MES ist die engl. Abkürzung für "Manufacturing Execution System" und bezeichnet in einem Produktionsleitsystem die datentechnische Verbindung zwischen der kaufmännischen Ebene eines Unternehmens und der Produktion. Sie soll die Transparenz erhöhen, Kosten senken und den Durchsatz sowie die Qualität steigern.
Der Messbereich ist derjenige Bereich von Messwerten einer Messgröße, in dem vorgegebene, vereinbarte oder garantierte Fehlergrenzen nicht überschritten werden. Er ist durch einen Anfangs- und einen Messbereichsendwert bestimmt, die die Messspanne angeben. Der Messwert findet Anwendung in der Messtechnik.
Der Ausgabe- oder Anzeigebereich eines Messgerätes stimmt häufig, aber nicht notwendigerweise mit dem Messbereich überein.
Der Messbereichsendwert ist häufig der Bezugswert für die Berechnung der Fehlergrenze aus dem Klassenzeichen, wenn eine Genauigkeitsklasse zugrunde gelegt wird.
Der Begriff Messfehler ist veraltet und wird heute als Messabweichung bezeichnet. Er findet Anwendung in der Messtechnik und steht im Sinne der DIN-Norm 1319 für die Differenz zwischen dem angezeigten Messwert minus dem richtigen (wahren) Wert.
Der angezeigte Wert (Messergebnis) wird durch die Unvollkommenheit der Messgeräte und Messverfahren (systematischer Fehler (fsys)) und durch Einflüsse der Umwelt sowie durch zeitliche Veränderungen bei allen Messgrößen (zufälliger Fehler (fzuf)) verfälscht.
Die geometrische Summe (Wurzel aus der Quadratsumme) beider Messfehler ergibt den Gesamtfehler (fges). Dieser bei (Abnahme-)Messungen zwangsläufig auftretende Fehler wird in der Abnahmenorm DIN EN ISO 9906:2012 durch die Angabe zulässiger Gesamtmessunsicherheiten berücksichtigt, die nach der bei Drucklegung noch laufenden Revision der DIN EN ISO 9906:2012 geändert werden. siehe Abb. 1 Messfehler
Abb. 1 Messfehler: Zulässige Werte der Gesamtmessunsicherheiten nach DIN EN ISO 9906:2012
In einer noch unveröffentlichten Revision dieser Norm sind die geänderten zulässigen Gesamtmessunsicherheiten beschrieben. siehe Abb. 2 Messfehler
Abb. 2 Messfehler: Maximal zulässige Messunsicherheit im Garantiepunkt nach Revision von DIN EN ISO 9906:2012
Es ist grundsätzlich nicht möglich, in der Messtechnik fehlerfrei zu messen. Durch eine Vielzahl von Ursachen wird die zu messende Größe nicht korrekt erfasst. Die Messgenauigkeit beschreibt dabei den Übereinstimmungsgrad von Messwert und wahrem Wert der Messgröße. Diese Genauigkeit ist keine absolute Angabe, sondern eine relative Messabweichung bezogen auf ein rückführbares Kalibriernormal.
Das Messgerät liefert den Messwert einer Messgröße und wird in der Messtechnik eingesetzt. Jedes Messgerät hat einen bestimmten Ausgabe- oder Anzeigebereich, in dem Informationen über die Messgröße bereitgestellt werden.
Wichtige und bewährte Messverfahren sowie Messeinrichtungen (Messgeräte) in der Kreiselpumpentechnik
Die Messgröße ist diejenige physikalische Größe in der Messtechnik, der eine Messung gilt. Dabei wird der Begriff sowohl für "Messgröße im allgemeinen Sinn" als auch für "spezielle Messgröße" verwendet. Als Messgröße im allgemeinen Sinn wird eine physikalische Größe beschrieben, die Ziel einer Messung war oder sein wird, wie z. B. die Masse, Leistung oder Temperatur. Bei der speziellen Größe handelt es sich um eine zu speziellen Sachbezügen gehörende (abgeleitete) Größe, wie z. B. das Volumen eines vorgelegten Körpers oder der Widerstand eines vorgelegten Kupferdrahtes bei einer gegebenen Temperatur.
Die Messgröße muss nicht unmittelbar Gegenstand der Messung sein. Sie kann auch über physikalisch bekannte oder festgelegte mathematische Beziehungen aus Größen (Messwerte) bestimmt werden, für die unmittelbare Messungen gelten.
Eine Unterscheidung erfolgt in dimensionslose Messgrößen wie den Winkel, deren Werte unmittelbar als rationale Zahlen zu messen sind, und dimensionsbehaftete Messgrößen wie die Dichte, deren Werte jeweils mit Werten derselben Dimension zu vergleichen sind. Diese Vergleichbarkeit wird durch die Angabe des Wertes einer dimensionsbehafteten Messgröße als Vielfaches der zugehörigen Maßeinheit ausgedrückt.
Der Begriff Messspiel gehört in den Bereich der Messunsicherheit und bezeichnet einen Bereich, in dem die Erfassung eines Messwertes trotz fehlender Messgenauigkeit gültige Werte liefert. Er findet Anwendung in der Messtechnik.
Die Messtechnik umfasst die Gesamtheit aller Maßnahmen zur Zustandsbestimmung von physikalischen Größen. Sie bedient sich dabei Messgeräten und Methoden zur Bestimmung (Messung) physikalischer Größen wie bspw. Länge, Gewicht, Kraft, Druck, Strom, Temperatur oder Zeit. Die steigenden technischen und wirtschaftlichen Anforderungen bei der Entwicklung, dem Bau und Betrieb von Kreiselpumpen machen zunehmend eine Quantifizierung von technisch-physikalischen Zuständen sowie Größen notwendig und haben zur Folge, dass sich die messtechnische Aufgabenstellung erweitert. Dies gilt auch für den Einsatz von Messgeräten zum Zwecke der Überwachung und Regelung. Dabei sind mit verbesserten Methoden die konventionellen Messaufgaben zu lösen, während wieder neue hinzukommen.
Die Verfahren der elektrischen und elektronischen Messtechnik werden zunehmend eingesetzt. Sie sind auf vielen Gebieten schon unersetzliche Routineverfahren. Aktuelle technische Entwicklungen sind durch die Anwendung der elektrischen (digitalen) Messwerteübertragung von Vielstellen -messeinrichtungen und Datenverarbeitungsanlagen gekennzeichnet.
Wichtige Teilgebiete der Messtechnik sind die Entwicklung von Messsystemen und -methoden sowie die Erfassung, Modellierung und Reduktion (Korrektur) von Messabweichungen und unerwünschten Einflüssen. Dazu gehört auch die Justierung und Kalibrierung von Messgeräten. Die Messtechnik ist in Verbindung mit Steuerungs- und Regelungstechnik eine Voraussetzung für die Automatisierungstechnik.
Der Messumformer ist ein Messgerät (siehe auch Sensor), das zusätzlich zu den beinhalteten Sensoren auch eine Elektronik zur sofortigen Anwendung mitführt. Dabei wandelt gemäß der grundlegenden Norm DIN 1319 ein Messumformer eine Eingangsgröße entsprechend einer festen Beziehung in eine Ausgangsgröße um. Häufig wird auch bei der Bezeichnung der englische Begriff Transmitter verwendet wie bei dem Druck- oder Niveautransmitter. Als Eingangssignal kommen viele verschiedene physikalische Größen vor. Dabei wird der Teil des Messmittels, der auf die Messgröße unmittelbar anspricht, Messgrößen-Aufnehmer oder Sensor genannt (gemäß DIN 1319). Sie erzeugen als Ausgangssignal häufig ein normiertes analoges elektrisches Einheitssignal wie 0 ... 20 mA, 4 ... 20 mA oder 0 ... 10 V, können aber auch eine digitale Signalstruktur aufweisen. Diese Messumformer bieten häufig eine galvanische Trennung von Mess- und Ausgangsgröße.
Die Messunsicherheit umfasst nach der DIN 1319, Blatt 3 die zufälligen Fehler aller Einzelgrößen, aus denen das Messergebnis berechnet wird sowie zusätzlich nicht erfasste, da nicht messbare und somit nur abschätzbare systematische Fehler. Sie findet Anwendung in der Messtechnik.
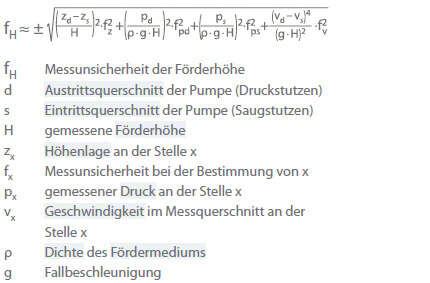
Die Ermittlung der systematischen Messunsicherheit einzelner Messverfahren und -geräte muss aus den Angaben der Messgerätehersteller erfolgen. Im Bedarfsfall sind diese Geräte zu kalibrieren, wodurch die systematische Messunsicherheit auf diejenige der Kalibriereinrichtung reduziert werden kann. Jede Messung ist zwangsläufig mit Messunsicherheit behaftet, auch wenn die benutzten Messverfahren, Geräte und Auswertungsvorschriften genau den jeweiligen Abnahmeregeln entsprechen. Bei einem Vergleich der Versuchsergebnisse mit den garantierten Werten muss diese Messunsicherheit in geeigneter Weise berücksichtigt werden, die von der Pumpe und den garantierten Werten unabhängig (siehe DIN EN ISO 9906) ist. Wird der Kennwert einer Pumpe wie bspw. die Förderhöhe aus mehreren (verschiedenen) Messgrößen berechnet, so muss die Messunsicherheit für diese durch geometrische Addition (Wurzel aus der Quadratsumme) aus den Messunsicherheiten der jeweiligen Einzelgrößen ermittelt werden:
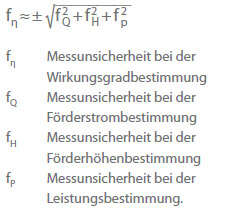
Ähnlich ist bei der Ermittlung der Messunsicherheit bei der Beurteilung eines aus verschiedenen Messwerten zusammengesetzten Rechenwertes vorzugehen. So setzt sich z. B. der Wirkungsgrad primär aus den Messergebnissen von Förderstrom, Förderhöhe und aufgenommener Leistung zusammen, deren Messunsicherheiten die des Wirkungsgrades bestimmen.
Liegen keine spezifischen Toleranzwerte der Gerätehersteller vor, dann können festgelegte Gesamtmessunsicherheiten benutzt werden. siehe Abb. 1, 2 Messfehler
Ein Messwert ist der Wert einer Messgröße, der von einem Messgerät oder einer -einrichtung geliefert wird. Er findet Anwendung in der Messtechnik und wird durch das Produkt aus Zahlenwert sowie Einheit ausgedrückt; häufig wird er auch normiert und in Prozent angegeben.
Die Bezeichnung MID ist die Abkürzung für die "Magnetisch-Induktive Durchflussmessung" und wird auch als Induktive Durchflussmessung (IDM) bezeichnet. Sie steht für ein Messprinzip eines Sensors, bei dem aus einem Durchfluss ein elektrisch nutzbares Signal erzeugt wird. Dazu werden die Ladungsträger in einer Flüssigkeit durch ein Magnetfeld abgelenkt, wodurch sie eine elektrische Spannung erzeugen.
Die Minderleistung spielt eine wichtige Rolle bei der Berechnung des radialen oder halbaxialenLaufrades einer Kreiselpumpe, mit der eine bestimmte Förderhöhe (H) bei dem Förderstrom (Q) verwirklicht werden soll. Ausgehend von unendlich vielen (∞) und unendlich dünnen Schaufeln des Laufrades würde sich theoretisch (th) in einer idealen (reibungsfreien) Fl�üssigkeit die Förderleistung (Pth.∞) ergeben aus:
Dabei ergibt sich bei idealer Flüssigkeit und unendlicher Schaufelzahl eine schaufelkongruente, d. h. der Schaufelform folgende, Strömung im Laufrad und daraus nach der EULERschen Hauptgleichung (siehe Strömungslehre) die theoretische Förderhöhe Hth.∞ . Bei endlicher Schaufelzahl (z) ergibt sich jedoch eine Abweichung der Strömungsrichtung im Laufrad von der Schaufelform. Insbesondere ist der mittlere Winkel der Relativgeschwindigkeit am Laufradaustritt bei endlicher Schaufelzahl (z) kleiner als der Schaufelaustrittswinkel. Diese Abweichung, die mit abnehmender Schaufelzahl (z) größer wird, wird auch als Minderumlenkung bezeichnet und hat zur Folge, dass die theoretische Förderhöhe (Hth) und somit (bei gleichem Förderstrom und gleicher Dichte) auch die theoretischeFörderleistung(Pth) bei endlicher Schaufelzahl kleiner sind als bei unendlicher Schaufelzahl:
Damit folgt für die Minderleistung (ΔPth.) eine Leistungsdifferenz, die bei üblichen radialen Laufrädern bei ca. 25 bis 60 % der Förderleistung liegt. Die Minderleistung beträgt:
Die Minderleistung ist im energetischen Sinne kein Leistungsverlust, da sie für die reibungsfrei angenommene Strömung im Laufrad gilt.
Das Verhältnis (Hth.∞ zu Hth) wird durch den Minderleistungsfaktor (1 + p) angegeben, der empirisch den Einfluss von Schaufelzahl, Laufradgeometrie, Laufraddurchmesser, Schaufelwinkel am Austritt und der Leitvorrichtung hinter dem Laufrad beinhaltet.
Der Zusammenhang zwischen den Förderhöhen H und Hth ist durch den hydraulischen Wirkungsgrad(ηh) gegeben.
Die Berechnung eines Laufrades nach der Minderleistungstheorie setzt eine Fülle von Erfahrungen voraus. Zum Einsatz kommen dabei überwiegend numerische Rechenverfahren (siehe CFD). Die Berechnung von axialen Laufrädern erfolgt nach der Tragflügeltheorie, die ebenfalls numerische Strömungsberechnungsverfahren verwendet.
Der Mindestförderstrom bezeichnet den Förderstrom, der mindestens vorliegen muss, um unzulässige, Temperaturerhöhungen in der Pumpe zu vermeiden. So soll das hinter einer Kesselspeisepumpe angeordnete Freilauf-Rückschlagventil den Mindestförderstrom aufrechterhalten. siehe Abb. 5 Armatur
Die Mindestzulaufhöhe bezeichnet die notwendige Zulaufhöhe, um einen einwandfreien Betrieb der Pumpe (z. B. Vermeidung von Kavitation) zu gewährleisten.
Bei der Untersuchung von Strömungen kann es auch aus wirtschaftlichen Gründen erforderlich sein, dass die Untersuchungen statt am Original an geometrisch ähnlichen Modellen durchgeführt werden (siehe Ähnlichkeitsbedingungen). Dabei ist außer der geometrischen auch die physikalische Ähnlichkeit zu erfüllen.
Die hier zugrunde liegenden physikalischen Gesetze (Differenzialgleichungen einschließlich Randbedingungen) müssen invariant (unveränderlich) gegen Ähnlichkeitstransformationen formuliert werden. Dies geschieht durch die Division aller vorkommenden physikalischen Größen durch Potenzprodukte von für die Anordnung charakteristischen Größen, um Verhältnisgrößen der Einheit 1 zu erhalten.
Die physikalische Ähnlichkeit liegt vor, wenn die Verhältnisgrößen (siehe Kennzahl) für Original und Modell gleich sind. Die durch die Kennzahlen vermittelten Beziehungen zwischen den physikalischen Größen im Original und Modell heißen Modellgesetze.
Bei Kreiselpumpen sind unter der Voraussetzung reibungsfreier, inkompressibler, nicht kavitierender Strömung mithilfe der charakteristischen Größen Laufraddurchmesser (D), Drehzahl (n), Fallbeschleunigung (g) und Dichte des Fördermediums (ρ) verschiedene Kennzahlen zu bilden.
Da die Pumpenwirkungsgrade mehr oder weniger von der Reibung beeinflusst werden, gelten für sie andere Umrechnungsgesetze (siehe Wirkungsgradaufwertung). Die Wahl der charakteristischen Größen zur Bestimmung der Kennzahlen ist weitgehend willkürlich. So werden z. B. bei der theoretischen Behandlung der Strömung in Radialrädern (siehe Laufrad) als charakteristische Größen die Umfangsgeschwindigkeit (u) des Laufrades, der Austrittsdurchmesser (D) des Laufrades und die Austrittsbreite (b) des Schaufelkanals gewählt. Damit werden die folgenden beiden Kennzahlen gebildet, wobei Δhs die isentrope Zunahme (siehe Entropie) der verallgemeinerten spezifischen Enthalpie des Fördermediums ist.
Meist werden bei Strömungsuntersuchungen eine Länge (l) und Geschwindigkeit (v) als charakteristische Größe gewählt. Diese Strömungen mit Reibung werden durch die kinematische Viskosität (ν) charakterisiert. Daraus abgeleitet wird die REYNOLDS-Zahl (Re), die auch das Verhältnis der Trägheitskraft zur Reibungskraft angibt.
Soll als äußere Kraft die Schwerkraft berücksichtigt werden, ist die Kennzahl der Fallbeschleunigung gleich g · l / v2. Ihr Kehrwert heißt FROUDE- Zahl (Fr).
Sie gibt das Verhältnis der Trägheitskraft zur Schwerkraft an. Die Berücksichtigung weiterer physikalischer Erscheinungen wie bspw. Kompressibilität, Wärmetransport und Oberflächenspannung erfordert die Einführung weiterer Kennzahlen.
Da die Kennzahlen nicht voneinander unabhängig sind, ist die physikalische Ähnlichkeit bei Berücksichtigung mehrerer Kennzahlen nicht mehr zu erreichen.
Modellversuche sind außer in der Strömungsmechanik bei Untersuchungen von Gestaltfestigkeits- und Wärmetransportproblemen weitverbreitet.
Wenn bei der experimentellen Untersuchung an einem Objekt oder Vorgang technische oder wirtschaftliche Gründe gegen Messungen unter Originalbedingungen (bspw. hinsichtlich Baugröße, Drehzahl, Stoffeigenschaften) sprechen, können die Messungen auch im Rahmen von Modellversuchen erfolgen.
Speziell bei hydraulischen Strömungsmaschinen (Kreiselpumpen, Wasserturbinen, Strömungsgetriebe) können Modellversuche durchgeführt werden:
an maßstäblich verkleinerten Ausführungen
und/oder bei reduzierter Drehzahl
und ggf. unter Verwendung eines Ersatzfluids
Die Vorteile von Modellversuchen sind:
geringere Abmessungen des Versuchsobjekts und des Prüfstands,
geringere Leistungen/Betriebskosten beim Versuch,
ggf. leichtere Handhabung des Fluids (z. B. kaltes Wasser anstelle von Heißwasser oder von giftigen, brennbaren, Flüssigkeiten),
Genauigkeit bei Übertragung der Ergebnisse von hochgenauen Modellversuchen höhere als bei Messung unter Originalbedingungen in der Anlage.
Bei der Planung, Durchführung und Auswertung von Modellversuchen sowie der Übertragung der Ergebnisse auf die originalgroße Maschine und/oder die Original-Betriebsbedingungen sind die Ähnlichkeitsgesetze zu beachten bzw. anzuwenden. Wesentliche Gesichtspunkte sind:
Einhaltung der geometrischen Ähnlichkeit, einschließlich Spaltweiten, wenn möglich auch Oberflächenrauheit; auch Längenänderungen durch elastische und thermische Verformungen sind zu beachten
Umrechnung der Versuchsergebnisse auf der Basis der Modellgesetze
Dynamische Ähnlichkeit meist nicht erfüllbar; bei unvermeidbarer Verletzung: Anwendung von Korrekturen auf die umgerechneten Ergebnisse, z. B. die sogenannte Wirkungsgradaufwertung bei Verletzung der Reynoldszahl-Gleichheit bei Modellversuch und Originalbedingungen
Bei Modellversuchen zur Kavitation: Beachtung der Flüssigkeitseigenschaften (Keimgehalt, Gasgehalt)
Das Monitoring ist die Zustandserkennung von Komponenten in einem z. B. verfahrenstechnischen Prozess. Ziel ist die regulierende Ablaufsteuerung, wenn die beobachteten Prozesse nicht wie gewünscht ablaufen bzw. Schwellenwerte unter- oder überschritten werden.
Das Pumpen-Monitoring ist hierbei ein wesentliches Element.
Motion Control bedeutet zu deutsch eine Bewegungssteuerung und bezeichnet die Steuerung von Antrieben zur Bewegungsführung in einer Maschine oder Anlage.
Motorschutz ist der Sammelbegriff für alle Maßnahmen zum Schutz von Elektromotoren und beinhaltet den Überlastungs-, den Kurzschluss-, den Unterspannungs- und den Phasenausfallschutz. Der Motorschutz soll Elektromotoren vor thermischer Überlastung aufgrund einer mechanischen Überbeanspruchung oder dem Ausfall einzelner Phasen schützen. Ein Elektromotor kann dabei durch die Überwachung seiner Stromaufnahme durch Motorschutzschalter oder Motorschutzrelais sowie der Temperatur in den Motorwicklungen durch Bimetallschalter und PTC-Widerstand vor Überlastung geschützt werden.
Das Motorschutzrelais wird auch als Überlastrelais bezeichnet und arbeitet nach dem gleichen Prinzip wie der Motorschutzschalter. Eine Selbstabschaltung des Motors erfolgt jedoch nicht direkt. Löst bspw. ein Überlastrelais aus, so werden kleinere (Hilfs-) Kontakte geschaltet, die meist ein Schütz (elektronischer Schalter) ansteuern, der dann den Verbraucher abschaltet. Ein Überlastrelais hat keinen Kurzschlussauslöser. Der dafür vorhandene thermische Auslöser (siehe Bimetall) kann im Kurzschlussfall evtl. zu langsam reagieren, sodass in den Motorenzuleitungen Sicherungen eingebaut werden müssen, um den Motorschutz zu gewährleisten.
Der Motorschutzschalter schützt einen Motor vor Überlast und Ausfall eines Außenleiters durch Überwachung seiner Stromaufnahme. Dies erfolgt meist bei dreiphasigen Drehstrommotoren hergestellten Motorschutzschaltern durch eine ODER-verknüpfte Auslösung in den drei Zuleitungen, deren Überwachung thermisch-mechanisch (Bimetall), thermisch-elektronisch (PTC-Widerstand) oder elektronisch (Strommessung) erfolgt.
Ein Wiedereinschalten nach einer Auslösung kann automatisch oder durch manuelles Drücken einer Entsperrtaste erfolgen.
Um das Versorgungsnetz vor Kurzschlüssen zu schützen, werden oft auch für den Motorschutz nicht notwendige Kurzschlussauslöser eingebaut. Diese müssen nach DIN VDE 0100 am Anfang einer Motorzuleitung platziert sein.
Als Muschelkurven bezeichnet man Linien konstanten Pumpenwirkungsgrades, die im Kennfeld der Förderhöhe zusätzlich eingetragen sind (siehe auch Kennfeld).

")


")

")
")
")